本节书摘来异步社区《乐高EV3机器人搭建与编程》一书中的第1章,第1.5节,作者:【美】Marziah Karch(卡奇),更多章节内容可以访问云栖社区“异步社区”公众号查看
1.5 主控器和电池
到目前为止,我们讨论的主题还主要集中在各类不同的零件上,你可以使用它们作为机器人的基础部分。但更重要的是那些使机器人活动的零件,如能使机器人移动的电机。现在让我们来认识那些重要的部件。
1.5.1 EV3智能砖
图1.36展示了EV3智能砖,它是机器人的大脑。它是套装中最重的部分,因为它内部充满了电池和运算元件,这使得它能够思考并为其他零件供电。你可以下载所有的项目,甚至可以直接在智能砖上编写程序。
不知你是否注意到, EV3智能砖的一端是编号为1~4的水晶头插口,另一端是编号为A~D的水晶头插口。这些插口就是用来连接传感器和电机的地方,它们通过智能砖为电机和传感器供电。在EV3智能砖的底部和侧面,有一些可以插销子的小孔,这是用来连接套装中的梁臂的。这里占用你一些时间,检查一下你的智能砖是否有电。

你可以把EV3智能砖翻过来,打开它的后盖,放入6节5号电池(如图1.37所示)。
注意
在使用EV3的过程中,可能会耗费很多电池,这取决于你使用它的频率。这样的话,选择可充电电池或许是个不错的主意。然而,很多MINDSTORMS爱好者注意到,当使用充电电池时,可能因为这些电池需要越来越频繁地充电而导致机器人的动作变得迟缓。如果你带着机器人去参加比赛,在比赛当天使用环保型一次性电池可能更好。
现在查看智能砖的两侧。
图1.38展示了智能砖一侧的蜂鸣器,机器人的声音就是从这里播放的。智能砖的两侧还有完全相同的3×3的L形横梁接口。
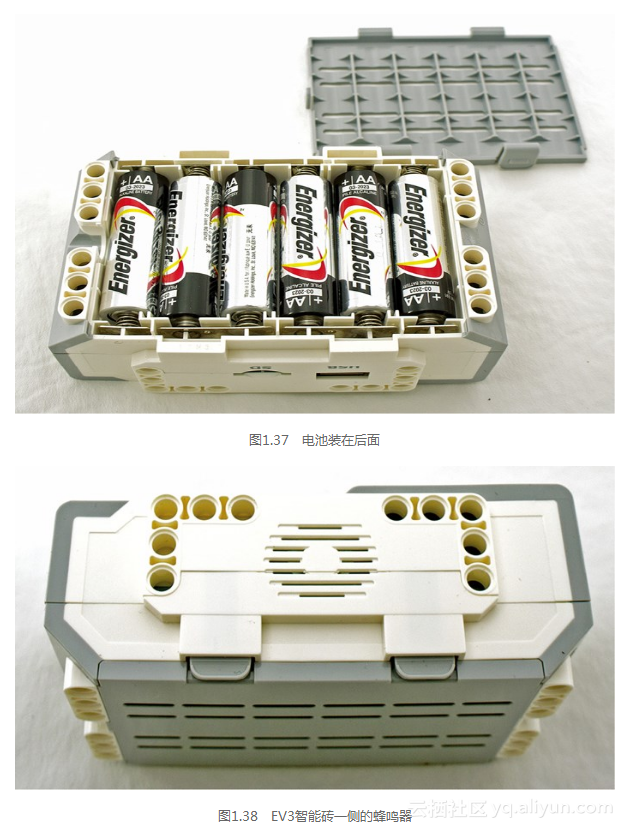
图1.39展示了蜂鸣器对面的装置,有USB插口和SD卡卡槽。如果你觉得EV3自身的存储空间不足,可以把SD卡插到EV3里面充当一个快速存储器,用于存储机器人程序或是一些数据和资料。 USB插口可以把EV3和电脑连接在一起,并从电脑的编程软件中向机器人导入程序。对于电脑的编程软件,我会在第7章中作更详尽的介绍。
现在你已经较好地了解了EV3智能砖了,这时可以了解一下它所驱动的电机和传感器了。

1.5.2 伺服电机
图1.40展示了EV3家庭版套装中的两个大型伺服电机。这些伺服电机可以驱动轮子、梁或其他大型部件。红色零件旋转做圆周运动,你可以在它表面连接销或在中心连接轴。此外,伺服电机还可以把轴和销连接到其他零件上。

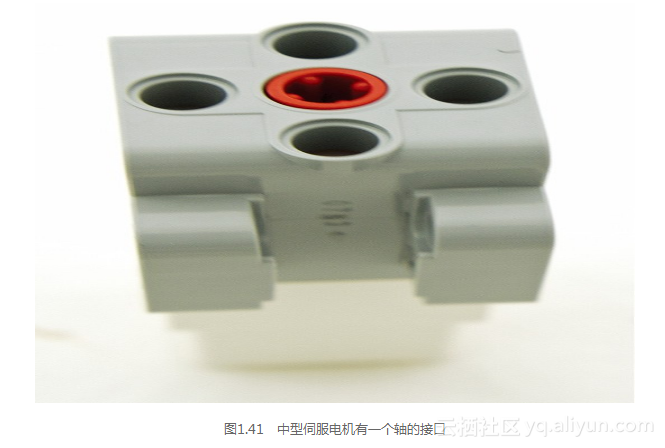
图1.41展示了中型伺服电机。这个伺服电机只有中间的接口可以旋转,它可以在旋转部件附近用于连接零件,也可以用来连接受伺服电机驱动的齿轮。
1.5.3 传感器
图1.42展示了触动传感器,触动传感器在EV3家庭版套装中只提供一个(NXT套

装有两个)。当传感器末端的红色触角被按下时,触动传感器会将数据传输到中央处理器。如果你把它放在一个机器车的最后面,它就可以检测到机器车是否发生了撞击。不仅如此,它最有用的地方莫过于可以充当一个开关,它可以控制机器人开启或停止,帮助机器人转换方向,以及重置一个程序等。 LEGO EV3教育版套装中有一个机器人设计叫作“平衡小子”,它就利用了触动传感器来充当开关。
颜色传感器(如图1.43所示)可以检测光,它可以识别不同的颜色,区分明暗的变化。在EV3套装中有一个颜色传感器,你可以用它来分类部件,检测它们的颜色,或使机器人沿着一条线行进。在第7章和第8章会介绍更详细的颜色传感器的用法。

图1.44展示了红外传感器和遥控器(也称为红外信标接收器),这是EV3家庭版独有的部件。 EV3教育版套装没有遥控器,而是用一个超声波传感器来代替。红外传感器和遥控器(使用7号电池)可以作为几乎所有汽车或坦克机器人的遥控装置。你也可以单独使用红外传感器来检测是否有物体在传感器的前面。

1.5.4 数据线
现在你已经大致了解了EV3智能砖、伺服电机和传感器。接下来,需要认识数据线了,数据线是用作连接的。
图1.45展示了EV3套装中所包含的两种数据线。其中的一种就是USB线,它其

实就是一根标准的USB线。它的作用是连接EV3主机和电脑,然后向程序块中导入程序。还有另一种特殊的数据线,用来连接主机与电机或传感器,它与电脑和路由器连接的网络电缆很类似,但是它们的线路不太一样,因此不可以用EV3中的数据线代替网络电缆这一类的东西。
这种数据线有长短两种,包括4个25厘米的数据线、2个35厘米的数据线和一个50厘米的数据线。当你搭建一个机器人时,请先尝试选择最短的数据线;否则,你会花大量的时间盘起数据线以免它们挡路。你或许也可以用可书写胶布或魔术贴来标记数据线的末端以避免混淆。
最后,家庭版套装有一套贴纸(如图1.46所示),可以贴在翼形部件和角件上。另外,说明书(如图1.47所示)展示了如何搭建第一个机器人的过程,它实际上是把3个机器人的搭建过程整理成了一本手册。
现在你应该已经从盒子中取出所有的零件了(机器车的测试场地就是外面的包装),你可以打开这本说明书,然后开始搭建一个非常基础的机器人。你也可以翻到第2章去浏览一下EV3教育版。






