
本节书摘来异步社区《机器人构建实战》一书中的第2章,第2.2节,作者:丘柳东 ,王牛 ,李瑞峰 ,陈阳,更多章节内容可以访问云栖社区“异步社区”公众号查看。
2.2 利用舵机专用测试软件测试舵机及进行参数设置
博创提供了舵机的专用测试软件——Robot Servo Terminal,该软件的使用有以下几个步骤。
① Robot Servo Terminal软件安装。
② UP-Debugger多功能调试器的驱动安装。
③ UP-Debugger多功能调试器的硬件连接及设置。
④ 搜索已连接的舵机与舵机性能测试。
⑤ 舵机ID的修改。
在完成步骤①和②后,以后的舵机测试及参数设计可以从步骤③开始。Robot Servo Terminal软件的安装与一般软件安装没有区别,这里不再赘述。
Robot Servo Terminal软件默认是英文界面,如果使用中文界面,关闭软件后,打开软件的安装目录,删除EnDll.dll文件,再次打开软件时则变成中文界面。
本书中使用的Robot Servo Terminal软件均采用英文界面。
2.2.1 UP-Debugger多功能调试器的驱动安装
UP-Debugger多功能调试器是CDS5516舵机的主要调试硬件。相对于其他的调试方式,通过调试器和Robot Servo Terminal可以调试和设置更多的舵机参数,以判断舵机的局部或总体性能。
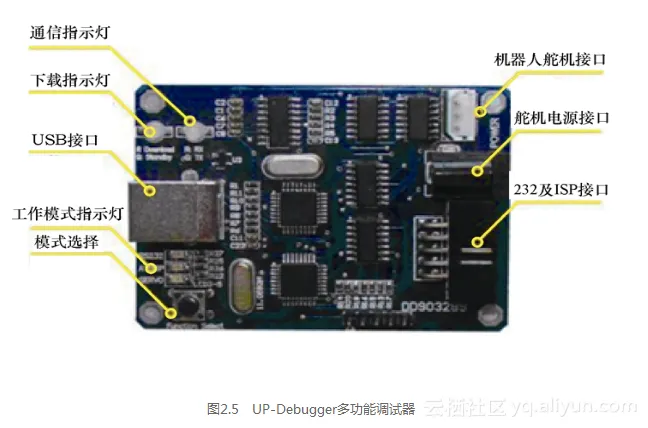
图2.5显示了UP-Debugger多功能调试器进行舵机调试时所需的接口、指示、设置部件,通过模式选择按钮可以将调试器的工作模式在RS232、AVRISP、SERVO之间相互切换。调试舵机时,需要通过模式选择按钮将功能切换到SERVO模式。
在安装驱动程序之前,需要用数据线(见图2.6)将调试器与计算机进行连接。如果是WIN7 32位和WIN XP操作系统,在数据线连接成功后,会自动弹出对话框进行安装驱动提示。用户可以通过制定路径来安装驱动。安装过程如下。

① 在界面选择“否、暂时不”,单击“下一步”按钮。
② 在新弹出的界面选择“从列表或制定位置安装(高级)”,单击“下一步”按钮。
③ 在弹出的对话框中找到驱动程序的文件夹,单击“确定”按钮开始安装驱动。
驱动安装成功后会在设备管理器中出现这个调试器的端口号。打开设备管理器有多种方式,以下是其中一种。
① 右击“我的电脑”或“计算机”图标,选择“管理”。
② 单击设备管理器,单击“端口(COM和LPT)”。
在列表中会添加系统分配给该调试器的端口号,如图2.7所示。括号内的“COM1”中的数字1即为端口号。
连接USB端口的不同,会导致端口号也不一样,由于可能安装了其他占用端口的软件,即使是同一品牌的计算机端口号也会有所区别,所以在每次利用Robot Servo Terminal软件测试舵机时,都需要到设备管理器去确定所使用的端口号。
当没有自动弹出对话框时,也可以打开设备管理器,按照WIN7 64位及以上操作系统进行驱动安装。与WIN7 64位及以上操作系统不同的是,只需要一次即可安装成功。
现在大多数计算机安装的是WIN7 64位或更高级的操作系统,在利用数据线连接调试器后,需要到设备管理器去手动更新驱动程序,打开设备管理器界面,进行以下操作。
① 右击新增带黄色问号的串口设备,一般标题为“”。
② 选择“浏览计算机以查找驱动软件”,单击“下一步”按钮。
③ 找到驱动文件,系统自动安装驱动,完成后关闭界面,端口设备的标题一般变为“USB Serial Port”,没有指名端口号,带黄色感叹号。
④ 如果黄色图标未消失,继续步骤①②。
⑤ 串口设备标题为“USB Serial Port(COM1)”时,带有端口号,驱动安装完成(COM后面的1不固定,只起示意作用)。
2.2.2 UP-Debugger多功能调试器的连接
测试舵机,需要调试器将舵机与计算机进行相连,具体步骤如下。
① 利用USB数据线连接调试器和计算机,数据线给调试器供电并传输测试指定和回传舵机的反馈信息。
② 利用舵机线将舵机连接至调试器。
③ 将电源适配器连接到调试器,实现舵机的供电。
④ 利用模式按钮切换到SERVO模式。

连接中需要注意以下几点。
① 对多个串联舵机进行测试时,需要明确每个舵机的ID是唯一的。如果存在两个舵机具有相同的ID,则无法得到正确的调试结果或者软件出现错误。
② 调试器与计算机连接后,如果绿色指示LED灯不亮,需要检查调试器或数据线是否损坏。
③ 在软件界面操作时(向舵机发送指令),如果未能得到预期的结果,而此时红色指示LED灯没有闪烁,需要检查调试器是否损坏以及数据线是否连接好。
④ 电源适配器用来给舵机提供电源,必须接到调试器,否则无法检测到舵机。
2.2.3 利用Robot Servo Terminal检测舵机及ID修改
在Robot Servo Terminal软件打开后的操作界面如图2.9所示,包含以下6个功能组合框。

① 通信连接组合框:进行舵机与测试软件相连接的操作。
② 舵机查找组合框:进行舵机查找的操作。
③ 舵机基本信息及设置组合框:进行舵机基本参数的查看与设置操作。
④ 舵机性能检测组合框:进行舵机的性能检测操作。
⑤ 舵机报警信息组合框:显示舵机的报警信号。
⑥ 舵机状态监控组合框:一般与舵机性能检测组合框一起,为舵机性能的优劣判断提供必要的依据。
软件一开始默认显示的界面为Operate菜单的显示界面,对于其他菜单的显示界面及其操作可查阅相关资料。
(1)通信连接
通信连接是舵机测试的第一步,在设备管理器查找正确的端口号,填写到软件界面的COM文本框,如果端口号正确,按下“Open”按钮后,指示灯变成红色,按钮标题变成“Close”。
一般情况下,波特率Baud保持默认即可。
(2)舵机查找
打开端口后,可以接着查找连接到调试器的舵机,如图2.10所示。如果串联了多个舵机,需要将“Single Node”选项去掉。如果只是单个舵机,那么选择“Single Node”选项可以加快查找速度。
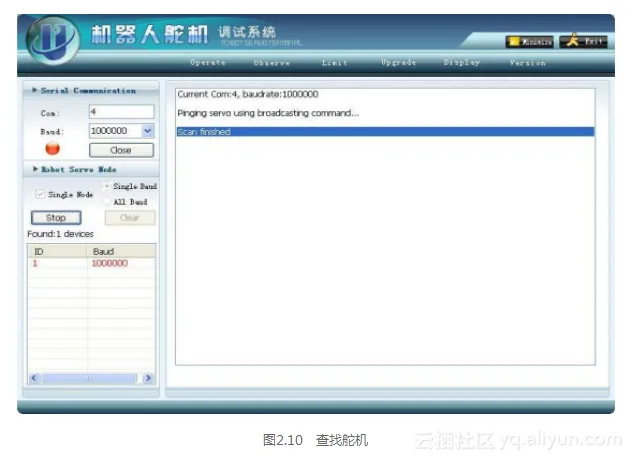
按下“Search”按钮,连接到调试器的舵机ID将显示在左下角的列表框内。此时“Search”按钮变成“Stop”按钮,按下“Stop”按钮,结束查找过程。
选择列表框中的一个舵机ID,可以进行舵机基本信息的设置与舵机性能检测。
需要注意的是,如果没有选择舵机ID而直接进行其他操作,有可能会弹出乱码对话框,此时需要到任务管理器中去结束整个软件的运行,再重新打开软件进行操作。
(3)修改舵机ID
每个CDS5516舵机都有自己单独的ID号,作为舵机的身份识别依据。即使断电后舵机ID也会自动保存。在同一个控制平台内,绝大部分情况舵机的运动各不相同,如果存在两个及以上相同ID的舵机,控制器无法正确控制舵机。所以需要在搭建之前,将所用的舵机ID设置成唯一。
舵机出厂时默认ID是1。下面通过实例来介绍修改舵机ID的方法,将ID为1的CDS55xx的ID设置为10,如图2.11所示。

操作之前要确认单击了列表框中某个舵机的ID(假设为1),此时右侧Primary Set组合框中的ID输入框的内容自动替换成1,将ID输入框中的内容修改为10,单击旁边的Set按钮,这样舵机ID号由1变为10。列表框中的舵机ID也会自动更新。
波特率(Baud)、返回值(Return)、返回延时(Return Delay)的设置方法与ID设置一样,一般不需要改变。
(4)舵机调试
舵机调试在Servo Operation组合框完成,功能介绍如下。
ID输入框:用于输入当前组中操作对应的舵机ID,此输入框自动更新为在搜索过程中选中舵机的ID,或者是重新设置后的ID,不建议手动输入。
Torque Out复选框:选择后舵机输出转矩,否则舵机将保持转矩卸载状态。
Led On复选框:打开CDS5516舵机内部的LED指示灯。
Servo Mode:设置舵机工作模式为(角度伺服)舵机模式。
Motor Mode:设置舵机工作模式为(直流调速)电动机模式。
Stop按钮:电动机模式下,停止转动。
Mid按钮:舵机模式下,回到中间角度(150°)。
电动机模式的测试:选择Motor Mode单选框,在Speed栏中拖动滑块,可以控制电动机相应的转速,正常情况下,速度绝对值越大,舵机的转速越大。当速度为负时,表示电动机反转。按Stop按钮可以将电动机停止。
电动机模式的调试需要注意以下几点。
① 界面显示的速度值不是真正的转速,但与实际转速成线性对应关系。
② 速度绝对值太小时,舵机会转动缓慢甚至无法启动,属于正常情况。一般在使用电动机模式下,速度绝对值不小于300。
③ 在设置较大速度绝对值时,舵机转动缓慢,即使其他状态正常,那么此舵机也是有问题的舵机。
舵机模式的测试:选择Servo Mode单选框,在Pos栏中拖动滑块,可以将舵机转到相对应的位置(角度),按Mid按钮可以将舵机置于中间位置(512)。
舵机模式的调试需要注意以下几点。
① CDS5516舵机的转动范围(0~300°)被线性放大到0~1023,界面显示的角度值需要进行换算才能得到真正的角度值。
② 舵机的角度测试应在0~1023之间较为均匀地选择若干个测试点,测试舵机是否可以稳定到达设定的角度值,如果此时舵机无法停止或者发生抖动,则说明舵机出现问题。
(5)舵机状态监控
Status Monitor组合框包含若干虚拟仪表盘,功能如下。
Speed:速度仪表盘。显示当前舵机的速度值,速度范围−1023~1023。
Temperature:温度仪表盘。显示当前舵机的温度,范围0~80℃。
Load:Load仪表盘。显示当前舵机的负载,范围−1023~1023。
Voltage:电压仪表盘。显示当前舵机的工作电压,范围2~10V。
Position:位置仪表盘。显示当前舵机的位置,范围0~1023。
在测试舵机的电动机模式时,Position位置仪表盘可以间接辅助判断舵机的好坏。
① 如果Position位置仪表盘的指针能够在0~1023有效范围之间匀速转动,那么大致可以确定舵机的电动机与舵机模式均正常。
② 如果指针不动,说明舵机的舵机模式无法定位。
③ 如果指针在有效范围的某段直接跳过,则舵机模式会在此段范围内发生抖动。
在测试舵机的舵机模式时,Position位置仪表盘显示的位置与设置的角度位置可能存在−3~3的差值,属于正常误差范围,不应作为舵机有问题的依据。
(6)舵机报警信息说明
Error Instruction组合框用于显示当前舵机的错误状态,在使用过程中,任何一种错误状态被触发,相应的状态指示灯都会变成红色。默认情况下,发生过载或过热时将强制卸载以保护舵机。错误标志的含义见表2.1。

在测试过程中,可能会出现Over Position变红的情况。如果舵机正常,那么一般是舵机在使用舵机模式时,定位的最终位置超出了1023,此时将舵机位置设置在有效范围内即可取消该警示信号(使红灯变绿灯)。
2.2.4 舵机的完整测试过程
结合以上说明,可以得到完整的舵机测试过程。
① 按要求将舵机与计算机通过调试器连接。
② 打开Robot Servo Terminal软件,设置好端口号,查找舵机。
③ 选择需要测试的舵机ID,如果需要修改ID,在Primary Set组合框的ID框中输入修改后的ID,按相应的“Set”按钮完成修改。
④ 电动机模式测试:选中Motor Mode单选框,在Speed栏中拖动滑块,查看电动机转速是否正常。此时可以通过Position位置仪表盘大致判断舵机模式是否正常。
⑤ 舵机模式测试:选中Servo Mode单选框,在Pos栏中拖动滑块,将舵机转到相对应的位置(角度),按Mid按钮可以将舵机置于中间位置(512)。通过Position位置仪表盘可以确定是否转动到设定位置。

