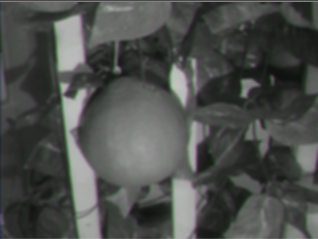
省电赛需求,要在单片机平台上使用摄像头模组采集图像,通过串口通信或者其他通信方式传输到上位机,由上位机来识别并发送指令给下位机。识别目标是绿色的未成熟柚子,如下图。通过颜色的识别是不太现实的了,但幸好柚子形状近似圆形,所以想到通过使用Hough变换检测圆,从而检测柚子。

1.硬件平台
- STM32F103ZET6单片机
- OV7670带FIFO摄像头模组,最高支持320*240分辨率
- 一台有USB接口的电脑
2.上位机软件
我使用Qt进行开发。这个我个人还是比较有经验的。这里主要是RGB565转RGB888编码算法和串口通信的编写。
RGB565是一种颜色编码方式,相对于一般的RGB888(红绿蓝各8位,三个字节)的存储方式更节省空间,一般用在存储空间比较少的场合,比如嵌入式系统。她可以存储256*256=65536种颜色,图片质量相比而言不会受到太大影响。
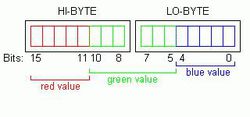
- RGB565转RGB888的主要思路是截取有效的5/6/5位,然后通过左移和右移使其实际只有8位(高8位为0),最后拼接到代表RGB888编码的uint类型变量。
/************颜色编码转换*************/
#define RGB888_RED 0x00ff0000
#define RGB888_GREEN 0x0000ff00
#define RGB888_BLUE 0x000000ff
#define RGB565_RED 0xf800
#define RGB565_GREEN 0x07e0
#define RGB565_BLUE 0x001f
//编码转换
unsigned short RGB888ToRGB565(unsigned int n888Color)
{
unsigned short n565Color = 0;
// 获取RGB单色,并截取高位
unsigned char cRed = (n888Color & RGB888_RED) >> 19;
unsigned char cGreen = (n888Color & RGB888_GREEN) >> 10;
unsigned char cBlue = (n888Color & RGB888_BLUE) >> 3;
// 连接
n565Color = (cRed << 11) + (cGreen << 5) + (cBlue << 0);
return n565Color;
}
unsigned int RGB565ToRGB888(unsigned short n565Color)
{
unsigned int n888Color = 0;
// 获取RGB单色,并填充低位
unsigned char cRed = (n565Color & RGB565_RED) >> 8;
unsigned char cGreen = (n565Color & RGB565_GREEN) >> 3;
unsigned char cBlue = (n565Color & RGB565_BLUE) << 3;
// 连接
n888Color = (cRed << 16) + (cGreen << 8) + (cBlue << 0);
return n888Color;
}
- 在MainWindow种初始化一些参数
MainWindow::MainWindow(QWidget *parent) :
QMainWindow(parent),
ui(new Ui::MainWindow)
{
ui->setupUi(this);
//初始化时获取可用的串口
initSerialPort();
//创建一个串口对象
tc = QTextCodec::codecForName("GBK"); //支持汉字编码
serial = new QSerialPort;
//当串口准备好读数据时,调用读取数据的函数
connect(serial,SIGNAL(readyRead()),this,SLOT(readSerialData()));
//接收数据框设置为只读模式
// ui->textEdit->setReadOnly(true);
//初始化波特率,默认921600
baudBox=new QComboBox;
QStringList baudItems;
baudItems<<"1382400"<<"921600"<<"46080"<<"256000"<<"230400"
<<"128000"<<"115200"<<"76800"<<"57600"<<"43000"<<"38400"<<"19200"
<<"14400"<<"9600"<<"4800"<<"2400"<<"1200";
ui->baudBox->addItems(baudItems);
ui->baudBox->setCurrentIndex(1);
ui->sendButton->setEnabled(false);//开启串口之前限制发送按钮
}
- 不断刷新串口列表
//鼠标点击刷新当前存在的串口
void MainWindow::mousePressEvent(QMouseEvent *e)
{
serial->clear(); //清掉所有串口,重新检测当前串口
ui->portBox->clear();//删除当前所以已经存在的串口号
initSerialPort();
}
void MainWindow::initSerialPort()
{
QList<QSerialPortInfo> infos = QSerialPortInfo::availablePorts();
if(infos.isEmpty())
{
// QMessageBox::information(this,"提示信息","当前没有可用的串口");
return;
}
//将搜索串口号添加到下拉列表中
foreach (QSerialPortInfo info, infos)
{
ui->portBox->addItem(info.portName());
}
}
- 打开串口时根据下拉框的参数进行初始化
//打开或者关闭串口
void MainWindow::on_openSerialButton_toggled(bool checked)
{
if(ui->connectPushButton->text() == "断开")
{
QMessageBox::information(this,"提示信息","请关闭WIFI连接");
return;
}
//这里可以输出一些串口出错的信息
if(serial->error()==serial->DeviceNotFoundError)
{
QMessageBox::information(this,"提示信息","串口打开失败");
return;
}
if(checked)
{
ui->openSerialButton->setText(tr("关闭串口"));
//设置串口名
serial->setPortName(ui->portBox->currentText());
//打开串口
serial->open(QIODevice::ReadWrite);
//设置波特率
serial->setBaudRate(ui->baudBox->currentText().toInt());
//设置数据位
serial->setDataBits(QSerialPort::Data8);
//设置奇偶校验
serial->setParity(QSerialPort::NoParity);
//设置停止位
serial->setStopBits(QSerialPort::OneAndHalfStop);
//关闭串口设置按钮,使能数据发送按钮
ui->portBox->setEnabled(false);
ui->baudBox->setEnabled(false);
ui->sendButton->setEnabled(true);
}
else
{
ui->openSerialButton->setText(tr("打开串口"));
//关闭串口
serial->clear();
serial->close();
//使能串口设置按钮,关闭数据发送按钮
ui->portBox->setEnabled(true);
ui->baudBox->setEnabled(true);
ui->sendButton->setEnabled(false);
}
}
- 读取和清除
//串口读取数据
void MainWindow::readSerialData()
{
//接收的时候要将QByteArray转换成String才能够方便的显示在textEdit中
QByteArray buf;
buf=serial->readAll();
if(buf!=NULL)
{
data+=(tc->toUnicode(buf));
}
buf.clear();
}
//清除数据接收区的数据
void MainWindow::on_clearDataButton_clicked()
{
data.clear();
random_color();
ui->leftLabel->setText("柚子呢?");
ui->rightLabel->setText("柚子呢?");
update();
// ui->textEdit->clear();
}
3.图像识别
由于不需要颜色信息,我在OV7670模式选择中使用黑白模式,这样噪点会比较少

- 有时依旧会有不少噪点,先来一发高斯模糊再说
//读取图像并定义处理过程中使用的Mat
Mat originalImageL =imread("/original_left.png");
Mat cannyImageL;
Mat closeImageL;
Mat contoursImageL = Mat::zeros(originalImageL.size(),CV_8U);;
vector<vector<Point>> contoursL;
Mat outputImageL = originalImageL.clone();
//滤波去除噪点
GaussianBlur(originalImageL,originalImageL,cv::Size(BLUR_SIZE,BLUR_SIZE),1.5);
cv::Size(BLUR_SIZE,BLUR_SIZE)是卷积核的大小,最后一个参数是高斯函数的σ。效果如下,稍微有点糊但无伤大雅。
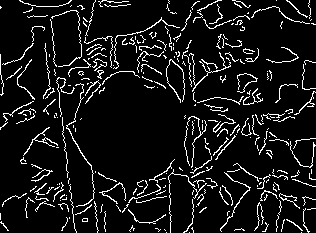
- Canny边缘检测。参数要多次尝试
//Canny边缘检测
Canny(originalImageL,cannyImageL,CANNY_VAR/2,CANNY_VAR);
Canny算子通常基于Soble算子。通过一个高阈值的Sobel和低阈值的Sobel综合考量可以得到比较令人满意的结果。柚子的大概轮廓出来了,虽然周围的树叶的轮廓会对识别有干扰,但没关系。
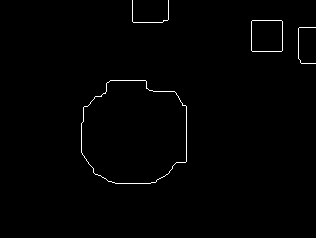
- 闭运算去除细小纹理
//结构元素
Mat element5(M_R_SIZE,M_R_SIZE,CV_8U,cv::Scalar(1));
morphologyEx(cannyImageL,closeImageL,MORPH_CLOSE,element5);
闭运算的定义是对图像先膨胀后腐蚀。比结构元素小的空隙和间隙会被闭合滤波器消除。可以看到柚子周围的小轮廓基本消除了。

闭运算的定义是对图像先膨胀后腐蚀。比结构元素小的空隙和间隙会被闭合滤波器消除。
- 提取连续区域中的轮廓(非必需)
findContours(closeImageL,contoursL, CV_RETR_LIST,CV_CHAIN_APPROX_NONE);
drawContours(contoursImageL, contoursL, -1, Scalar(255, 0, 255));
第三个参数使用CV_RETR_LIST 指提取所有轮廓。其他的值可以提取其中的层次结构,这里不介绍。经实验发现这一步可以略过,但加上的话更加直观。
- Hough变换检测圆形
std::vector<cv::Vec3f> circlesL;
HoughCircles(contoursImageL,circlesL,HOUGH_GRADIENT,2,CIRCLES_BAR,
CANNY_VAR,HOUGH_STD,R_MIN,R_MAX);
std::vector<cv::Vec3f>::const_iterator itcL = circlesL.begin();
while(itcL!=circlesL.end())
{
cv::circle(outputImageL,cv::Point((*itcL)[0],(*itcL)[1]),(*itcL)[2],
cv::Scalar(188),4);
cout << cv::Point((*itcL)[0],(*itcL)[1]) << (*itcL)[2] <<endl;
++itcL;
}
HoughCircles这个函数比较有意思,有必要看看函数原型。
void HoughCircles( InputArray image, OutputArray circles,
int method, double dp, double minDist,
double param1 = 100, double param2 = 100,
int minRadius = 0, int maxRadius = 0 );
源码中参数解释的翻译大概如下
§ method 使用的检测方法,一般使用霍夫梯度法,它的标识符为CV_HOUGH_GRADIENT
§ dp 用来检测圆心的累加器图像的分辨率于输入图像之比的倒数
§ minDist 圆之间最小的距离
§ param1 第三个参数 method设置的检测方法的对应的第一个参数,对于CV_HOUGH_GRADIENT为传递给canny边缘检测算子的高阈值
§ param2 第三个参数 method设置的检测方法的对应的第二个参数,表示在检测阶段圆心的累加器阈值,越低检测出的圆越多
§ minRadius 圆最小半径
§ minRadius 圆最大半径
参数method设为 CV_HOUGH_GRADIENT,dp 设为2 即可。在原图像上使用迭代器画出所有圆形,效果如下
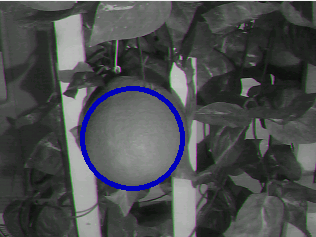
mission completed!
4.经验总结
- 在背景过于复杂的情况下,可以将图片转为HSI色域并且使用掩膜的方式将绿色的柚子和树叶分割出来。这里没有使用。
- 一系列操作都是一些比较基础的算法,但需要一些经验去选择和去调参。
- 要考虑摄像头和灯光等硬件因素
