在比赛和项目中用opencv用多了,就会发现很多opencv没有实现的算法,其中一些还是十分常用,在教科书上经常出现的。作为一个弱鸡,有的简单的算法能够自己实现(比如本文所要讲的),有的写到一半就打出GG,有的直接就下不了手。。。作为一个非计算机科班的自动化系学生,想要成为一名视觉算法工程师,还是有很长的路要走啊~~
区域生长
1.算法原理
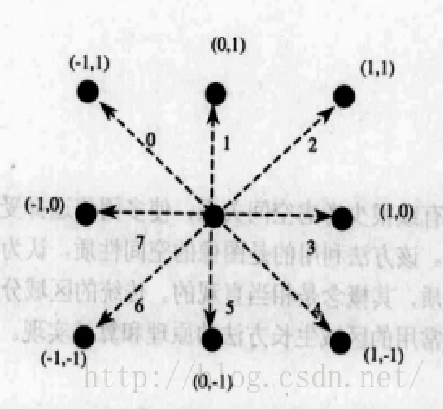
其实看上图和这个名字就很容易理解,区域生长是根据预先定义的生长准则将像素或子区域组合为更大区域的过程。基本方法是从一组“种子”点开始(原点),将与种子相似的临近像素(在特定范围内的灰度或颜色)添加到种子栈中,不断迭代,生成一大片区域。严谨的数学定义可以查看冈萨雷斯的数字图像处理。
2.算法实现
算法的步骤如下:
- 创建一个与原图像大小相同的空白图像
- 将种子点存入vector中,vector中存储待生长的种子点
- 依次弹出种子点并判断种子点如周围8领域的关系(生长规则)并与最大与最小阈值进行比较,符合条件则作为下次生长的种子点
- vector中不存在种子点后就停止生长
我这里因为项目需要,对原本的区域生长算法多加了最大与最小值的限制,作为默认参数可以不填。
/**
* @brief 区域生长算法,输入图像应为灰度图像
* @param srcImage 区域生长的源图像
* @param pt 区域生长点
* @param ch1Thres 通道的生长限制阈值,临近像素符合±chxThres范围内才能进行生长
* @param ch1LowerBind 通道的最小值阈值
* @param ch1UpperBind 通道的最大值阈值,在这个范围外即使临近像素符合±chxThres也不能生长
* @return 生成的区域图像(二值类型)
*/
Mat RegionGrow(Mat srcImage, Point pt, int ch1Thres,int ch1LowerBind=0,int ch1UpperBind=255)
{
Point pToGrowing; //待生长点位置
int pGrowValue = 0; //待生长点灰度值
Scalar pSrcValue = 0; //生长起点灰度值
Scalar pCurValue = 0; //当前生长点灰度值
Mat growImage = Mat::zeros(srcImage.size(), CV_8UC1); //创建一个空白区域,填充为黑色
//生长方向顺序数据
int DIR[8][2] = {{-1,-1}, {0,-1}, {1,-1}, {1,0}, {1,1}, {0,1}, {-1,1}, {-1,0}};
vector<Point> growPtVector; //生长点栈
growPtVector.push_back(pt); //将生长点压入栈中
growImage.at<uchar>(pt.y, pt.x) = 255; //标记生长点
pSrcValue = srcImage.at<uchar>(pt.y, pt.x); //记录生长点的灰度值
while (!growPtVector.empty()) //生长栈不为空则生长
{
pt = growPtVector.back(); //取出一个生长点
growPtVector.pop_back();
//分别对八个方向上的点进行生长
for (int i = 0; i<9; ++i)
{
pToGrowing.x = pt.x + DIR[i][0];
pToGrowing.y = pt.y + DIR[i][1];
//检查是否是边缘点
if (pToGrowing.x < 0 || pToGrowing.y < 0 ||
pToGrowing.x > (srcImage.cols-1) || (pToGrowing.y > srcImage.rows -1))
continue;
pGrowValue = growImage.at<uchar>(pToGrowing.y, pToGrowing.x); //当前待生长点的灰度值
pSrcValue = srcImage.at<uchar>(pt.y, pt.x);
if (pGrowValue == 0) //如果标记点还没有被生长
{
pCurValue = srcImage.at<uchar>(pToGrowing.y, pToGrowing.x);
if(pCurValue[0] <= ch1UpperBind && pCurValue[0] >= ch1LowerBind )
{
if (abs(pSrcValue[0] - pCurValue[0]) < ch1Thres ) //在阈值范围内则生长
{
growImage.at<uchar>(pToGrowing.y, pToGrowing.x) = 255; //标记为白色
growPtVector.push_back(pToGrowing); //将下一个生长点压入栈中
}
}
}
}
}
return growImage.clone();
}
上面是灰度图像的处理,我这里重载了三通道图像的区域生长
/**
* @brief 区域生长算法,输入图像应为三通道图像(RGB、HSV、YUV等)
* @param srcImage 区域生长的源图像
* @param pt 区域生长点
* @param ch1Thres ch2Thres ch3Thres 三个通道的生长限制阈值,临近像素符合±chxThres范围内才能进行生长
* @param ch1LowerBind ch1LowerBind ch1LowerBind 三个通道的最小值阈值
* @param ch1UpperBind ch2UpperBind ch3UpperBind 三个通道的最大值阈值,在这个范围外即使临近像素符合±chxThres也不能生长
* @return 生成的区域图像(二值类型)
*/
Mat RegionGrow(Mat srcImage, Point pt, int ch1Thres,int ch2Thres, int ch3Thres,
int ch1LowerBind=0,int ch1UpperBind=255,int ch2LowerBind=0,
int ch2UpperBind=255,int ch3LowerBind=0,int ch3UpperBind=255)
{
Point pToGrowing; //待生长点位置
int pGrowValue = 0; //待生长点灰度值
Scalar pSrcValue = 0; //生长起点灰度值
Scalar pCurValue = 0; //当前生长点灰度值
Mat growImage = Mat::zeros(srcImage.size(), CV_8UC1); //创建一个空白区域,填充为黑色
//生长方向顺序数据
int DIR[8][2] = {{-1,-1}, {0,-1}, {1,-1}, {1,0}, {1,1}, {0,1}, {-1,1}, {-1,0}};
vector<Point> growPtVector; //生长点栈
growPtVector.push_back(pt); //将生长点压入栈中
growImage.at<uchar>(pt.y, pt.x) = 255; //标记生长点
pSrcValue = srcImage.at<Vec3b>(pt.y, pt.x); //记录生长点的灰度值
while (!growPtVector.empty()) //生长栈不为空则生长
{
pt = growPtVector.back(); //取出一个生长点
growPtVector.pop_back();
//分别对八个方向上的点进行生长
for (int i = 0; i<9; ++i)
{
pToGrowing.x = pt.x + DIR[i][0];
pToGrowing.y = pt.y + DIR[i][1];
//检查是否是边缘点
if (pToGrowing.x < 0 || pToGrowing.y < 0 ||
pToGrowing.x > (srcImage.cols-1) || (pToGrowing.y > srcImage.rows -1))
continue;
pGrowValue = growImage.at<uchar>(pToGrowing.y, pToGrowing.x); //当前待生长点的灰度值
pSrcValue = srcImage.at<Vec3b>(pt.y, pt.x);
if (pGrowValue == 0) //如果标记点还没有被生长
{
pCurValue = srcImage.at<Vec3b>(pToGrowing.y, pToGrowing.x);
if(pCurValue[0] <= ch1UpperBind && pCurValue[0] >= ch1LowerBind&& //限制生长点的三通道上下界
pCurValue[1] <= ch2UpperBind && pCurValue[1] >= ch2LowerBind &&
pCurValue[2] <= ch3UpperBind && pCurValue[2] >= ch3LowerBind )
{
if (abs(pSrcValue[0] - pCurValue[0]) < ch1Thres &&
abs(pSrcValue[1] - pCurValue[1]) < ch2Thres &&
abs(pSrcValue[2] - pCurValue[2]) < ch3Thres) //在阈值范围内则生长
{
growImage.at<uchar>(pToGrowing.y, pToGrowing.x) = 255; //标记为白色
growPtVector.push_back(pToGrowing); //将下一个生长点压入栈中
}
}
}
}
}
return growImage.clone();
}
3.算法检验

原图像

区域生长后
References:
https://blog.csdn.net/robin__chou/article/details/50071313
数字图像处理(第三版) ——冈萨雷斯 P493
