如果仅仅是简单的拼接,可以采用stitching.cpp就差不多了;但是如果采用stitching_detailed.cpp的话,首先要解决的就是"编译问题",而后解决的是分析不同参数下的拼接结果和匹配效果;最后是能够理解一些原理。
OK,历经一些调试,编译成功,首先看一下有哪些参数可以调整。其实光靠这个就可以写一个简单的带调整的界面了。
F:\06.项目项目\opencv拼接\imageStitching\imageStitching>imageStitching.exe
Rotation model images stitcher.
stitching_detailed img1 img2 [...imgN] [flags]
Flags:
--preview
Run stitching in the preview mode. Works faster than usual mode,
but output image will have lower resolution.
--try_gpu (yes|no)
Try to use GPU. The default value is 'no'. All default values
are for CPU mode.
Motion Estimation Flags:
--work_megapix <float>
Resolution for image registration step. The default is 0.6 Mpx.
--features (surf|orb)
Type of features used for images matching. The default is surf.
--match_conf <float>
Confidence for feature matching step. The default is 0.65 for surf and 0.3 for orb. 这个我可能会单独配置
--conf_thresh <float>
Threshold for two images are from the same panorama confidence.
The default is 1.0.
--ba (reproj|ray)
Bundle adjustment cost function. The default is ray.
--ba_refine_mask (mask)
Set refinement mask for bundle adjustment. It looks like 'x_xxx',
where 'x' means refine respective parameter and '_' means don't
refine one, and has the following format:
<fx><skew><ppx><aspect><ppy>. The default mask is 'xxxxx'. If bundle
adjustment doesn't support estimation of selected parameter then
the respective flag is ignored.
--wave_correct (no|horiz|vert)
Perform wave effect correction. The default is 'horiz'.
--save_graph <file_name>
Save matches graph represented in DOT language to <file_name> file.
Labels description: Nm is number of matches, Ni is number of inliers,
C is confidence.
Compositing Flags:
--warp (plane|cylindrical|spherical|fisheye|stereographic|compressedPlaneA2B1|
compressedPlaneA1.5B1|compressedPlanePortraitA2B1|compressedPlanePortraitA1.5B1|
paniniA2B1|paniniA1.5B1|paniniPortraitA2B1|paniniPortraitA1.5B1|mercator|transve
rseMercator)
Warp surface type. The default is 'spherical'.
--seam_megapix <float>
Resolution for seam estimation step. The default is 0.1 Mpx.
--seam (no|voronoi|gc_color|gc_colorgrad)
Seam estimation method. The default is 'gc_color'.
--compose_megapix <float>
Resolution for compositing step. Use -1 for original resolution.
The default is -1.
--expos_comp (no|gain|gain_blocks)
Exposure compensation method. The default is 'gain_blocks'.
--blend (no|feather|multiband)
Blending method. The default is 'multiband'.
--blend_strength <float>
Blending strength from [0,100] range. The default is 5.
--output <result_img>
The default is 'result.jpg'.
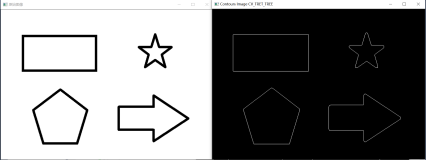
测试图片:
第一组:



--全部默认参数,80秒,结果

--preview 约80秒,这个图片拼接的不错,但是时间太长了。
--work_megapix <float>是用于寻找的,改为0.1后时间为30秒
--features (surf|orb) 改成orb后速度显著提升
--match_conf <float>也应该是数值越小匹配越快,但是失败的可能也越大。这个是不断调整参数的过程。
--ba (reproj|ray)默认是ray,改为reproj后,速度更快!更快
然后,就是
--warp
这一块,参数比较多
plane
cylindrical
fisheye
spherical
目前方向:图像拼接融合、图像识别 联系方式:jsxyhelu@foxmail.com