在上一篇中已经通过opencv获得到了各种图像,在这一篇中,将通过深度特性来进行物体的识别定位。
1,深度图像处理
- 1,运用opencv函数
inRange来获取一定深度范围内的物体,进行二值化操作,并在此函数中设置两个阈值,来控制深度范围。(处理对象---depth) - 2,运用opencv函数
morphologyEx来进行开运算,目的是消除图像中的噪点,开运算是形态学的基本操作,即先腐蚀后膨胀,具体可看我总结的这篇文章。 - 3,运用opencv函数
findContours来获取边框。 - 4,根据边框来获得最大外接矩形并画在rgb图上。
每个函数的具体用法请到opencv官方文档查看,因为再怎么说明也没有看文档(第一手资料)来的透彻。
2,处理结果
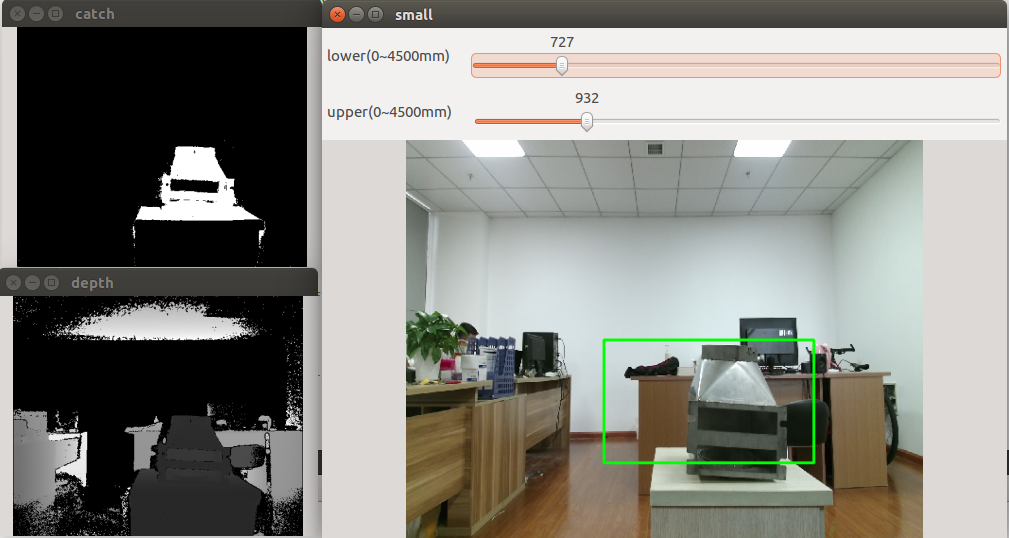
深度图与彩色图的匹配还未完成,只是粗略匹配了下,后期还得经过matlab进行图像匹配。