Festo日前展示了其两款仿生机器人,一款可以翻滚的蜘蛛机器人和一款飞狐机器人。
近日,据外媒报道,德国自动化技术厂商Festo推出来自其仿生学习网络最新成果的两款仿生机器人,一款可以翻滚的蜘蛛机器人BionicWheelBot和一款飞狐机器人BionicFlyingFox。
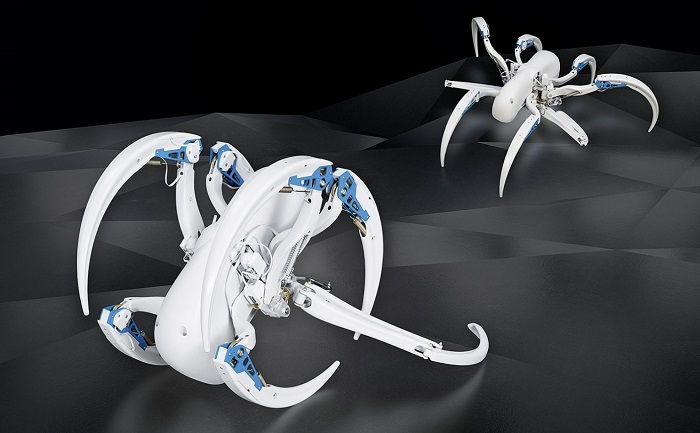
BionicWheelBot的生物样板为摩洛哥后翻蜘蛛(cebrennus rechenbergi)。它是一种生活在撒哈拉边缘比沙丘沙漠的蜘蛛,由柏林技术大学仿生学教授Ingo Rechenberg于2008年发现。这种蜘蛛可以与其同类一样行走,同时能在空中翻转与地面翻滚的组合形式移动。
开始翻滚时,BionicWheelBot将身体左右两侧的三条支脚转变为“车轮”。而两条在行走模式下折收起来的支脚现在重新获得释放,并在地面上推动变为球形的蜘蛛开始运动,同时在翻滚过程中提供冲力。由此能够防止BionicWheelBot陷入停滞,并保持在粗糙地面上前进。在翻滚模式下,人工蜘蛛与其自然样板一样,可以比行走更快移动。

另一款机器人是 BionicFlyingFox,就像所有飞行生物那样,它非常轻便。其采用模仿飞行哺乳动物翅膀特性的膜制作的翅膀,不会折皱或者撕裂,从而保证能在空中飞行并在高处停留一定的时间。
除了这二款机器人,Festo还曾推出跳跃袋鼠、机械蚂蚁等。可以看出,Festo一直在致力于研发各种动物机器人,也许将来会有更大的突破。
原文发布时间:
2018-03-29 14:04
本文作者:
伶轩
本文来自云栖社区合作伙伴镁客网,了解相关信息可以关注镁客网。