http://bbs.esrichina-bj.cn/ESRI/thread-58227-1-1.html
在最初的遥感学习中,我总是分不清传感器定标、辐射定标、辐射校正、大气校正这几个概念的区别与联系。而且在不同的资料中,各个名词的解释又不一样。例如:
定标是将传感器所得的测量值变换为绝对亮度或变换为与地表反射率、表面温度等物理量有关的相对值的处理过程(赵英时等《遥感应用分析原理与方法》)
遥感器定标就是建立遥感器每个探测器输出值与该探测器对应的实际地物辐射亮度之间的定量关系;建立遥感传感器的数字量化输出值DN与其所对应的视场中辐射亮度值之间的定量关系(陈述彭)。
辐射定标是将传感器记录的电压或数字值转换成绝对辐射亮度的过程(梁顺林《定量遥感》,2009)
其实,简单来说,辐射定标就是将记录的原始DN值转换为大气外层表面反射率,目的是消除传感器本身产生的误差,有多种方法:实验室定标、星上定标、场地定标。公式1就是将初始的DN值转换为辐射亮度,其中Lb是值辐射亮度值,单位是:W/cm2.μm.sr(瓦特/平方厘米.微米.球面度),Gain和Bias是增益和偏移,单位和辐射亮度值相同,可以看出,辐射亮度和DN值是线性关系。公式二是将辐射亮度值转换为大气表观反射率,式中:Lλ为辐射亮度值,d为天文单位的日地距离,ESUNλ为太阳表观辐射率均值,θs是以度为单位的太阳高度角。不过总的来说,这部分的工作基本上不需要用户自己做,相关的系数都包含在数据的头文件或者元数据中了。例如用Envi打开Modis数据,就是反射率(大气外层表观反射率),辐射亮度以及发射率三个数据类型(见dsbin:传感器定标http://bbs.esrichina-bj.cn/ESRI/viewthread.php?tid=56191)。

大气校正就是将辐射亮度或者表观反射率转换为地表实际反射率,目的是消除大气散射、吸收、反射引起的误差。主要分为两种类型:统计型和物理型。
统计型是基于陆地表面变量和遥感数据的相关关系,优点在于容易建立并且可以有效地概括从局部区域获取的数据,例如经验线性定标法,内部平场域法等,详细请参照玉妮小居新浪博客:辐射校正的统计模型http://blog.sina.com.cn/s/blog_5f4afe870100da1w.html。
另一方面,物理模型遵循遥感系统的物理规律,它们也可以建立因果关系。如果初始的模型不好,通过加入新的知识和信息就可以知道应该在哪部分改进模型。但是建立和学习这些物理模型的过程漫长而曲折。模型是对现实的抽象;所以一个逼真的模型可能非常复杂,包含大量的变量。例如6s模型,Mortran等。
而辐射校正指在光学遥感数据获取过程中,产生的一切与辐射有关的误差的校正(包括辐射定标和大气校正)。 三者关系如图:
Landsat Tm5辐射定标和大气校正(转载)
一、辐射定标
1. 由于ENVI 4.4 中有专门进行辐射定标的模块,因此实际的操作十分简单。将原始TM 影像打开以后,选择
Basic Tools–Preprocessing–Calibration Utilities–Landsat TM
2. 进入下一步参数选择:根据传感器类型选择Landsat 4,5 或者7。从遥感影像的头文件中获取Data Acquisition 的时间,Sun elevation。如果你是用File–Open External File–Landsat–Fast 的方法打开header.dat 的话,sun elevation 就已经填好了。这里Calibration Type 注意选择为Radiance。输出文件,定标就完成了。
二、大气校正
大气校正的目的是消除大气和光照等因素对地物反射的影响,获得地物反射率和辐射率、地表温度等真实物理模型参数,用来消除大气中水蒸气、氧气、二氧化碳、甲烷和臭氧对地物反射的影响,消除大气分子和气溶胶散射的影响。FLAASH 可以处理任何高光谱数据、卫星数据和航空数据(860nm/1135nm),这些数据是由HyMAP、AVIRIS、CASI、 HYDICE、HYPERION(EO-1)AISA、HARP、DAIS、Probe-1、TRWIS-3、SINDRI、MIVIS、 OrbView-4、NEMO等传感器获得的。FLAASH还可以校正垂直成像数据和侧视成像数据。
Flaash大气校正使用了 MODTRAN 4+ 辐射传输模型的代码,基于像素级的校正,校正由于漫反射引起的连带效应,包含卷云和不透明云层的分类图,可调整由于人为抑止而导致的波谱平滑。
FLAASH可对Landsat, SPOT, AVHRR, ASTER, MODIS, MERIS, AATSR, IRS等多光谱、高光谱数据、航空影像及自定义格式的高光谱影像进行快速大气校正分析。能有效消除大气和光照等因素对地物反射的影响,获得地物较为准确的反射率和辐射率、地表温度等真实物理模型参数。
校正过程
点击envi——Basic Tools -Preprocessing - Calibration Utilities - FLAASH
Spectral -FLAASH.或者点击envi-spectral- FLAASH
1、 输入数据必须是辐射校正后的数据,对辐射校正数据转成BIL或BIP格式(Basic Tools ——Convert Data);
2、 对输入数据进行头文件编辑,主要是对波长wavelenth(即每一波段的波长中心值)和波长宽度fwhm(每一波段的波长范围)的编辑。不是高光谱数据可以不对fwhm进行编辑。(envi——file——Edit Envi Header)
3、 输入数据后,弹出如下对话框
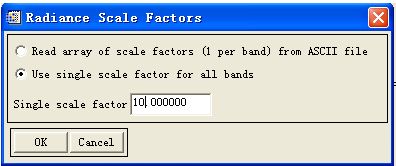
共有两种选择,如果输入影像不同波段有不同的转换因子,那选择第一种,反之第二种。我用的是irs影像所有波段都为同一因子,所以选用第二种,因子的值根据输入数据的单位与envi标准
单位的转换尺度。
Radiance Scale Factors是一个单位转换因子,如果你的radiance(光谱灵敏度)是标准单位w/m2 *um *rad ,而flaash要求输入的是uw/cm2*sr*nm,则该因子为10。
1m=103mm=106μm=109nm=1012pm(皮米)
1w=103mw=106μw 1兆瓦=106瓦
Rad平面角弧度 sr 立体角球面度
4、 设置输出参数,包括:Output Reflectance File.、Output Directory for FLAASH Files、和Output
Directory for FLAASH Files
5、 输入成像和传感器的参数

Scene center lacation 影像的中心点的经纬度,可以将影像打开,查看中心点的经纬度(通过在一下窗口输入中心点的行列号即可)
sensor altitude 传感器高度(轨道高度),选择正确的传感器后就可以显示了。
Ground Elevation 平均海拔(所选区域的)单位是km
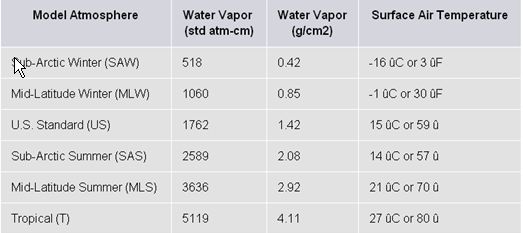
6、atmospheric model 地球大气模型 和气溶胶模型
6种标准大气模型
根据以下表选择所校正区域的大气模型
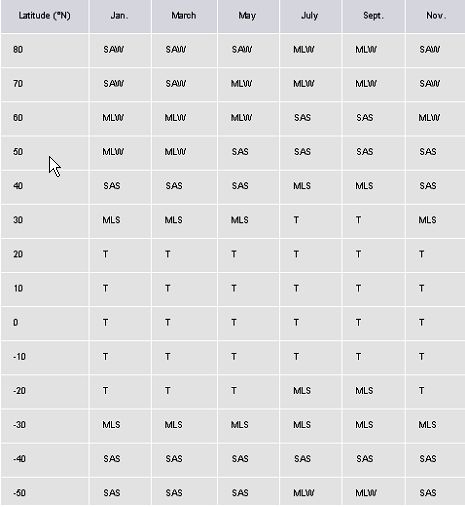
数据经纬度与获取时间决定选用的大气模型
水气反演设置 (Water Retri)
水气反演设置,采用两种方式对水气进行去除
a. 利用水气去除模型恢复影像中每个像元的水气量
使用水气反演模型,数据必须具有 15nm以上波谱分辨率,且至少覆盖以下波谱范围之一:1050-1210nm(优先考虑),770-870nm,870-1020nm。 对于大多传感器,水气反演默认显示的是 NO,因为大多数传感器没有适当的波段来补偿水气的影响。
b.单一的水气因数用于整体影像,默认是1,多光谱数据使用水气反演模型,可以在多光谱设置
中手动设置水气波段
气溶胶模型 (Aerosol Retri )
用气溶胶模型要求数据波段覆盖 660nm和 2100nm波谱。
a. 提供四种标准 MODTRAN 气溶胶模型
Rural(乡村)、Urban(城市)、Maritime(海洋)、Tropospheric
b. 两种气溶胶反演方法
2-Band(K-T)方法(类似模糊减少法),如果没有找到适应的黑值(一般是阴影区或者水体),系统将采用能见度值来计算;所以即使选择了该选项也要给。
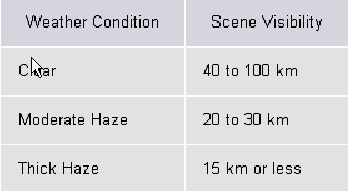
天气情况与能见度的关系
7.光谱打磨(高光谱) Spectral Polishing
光谱打磨(高光谱数据)
使波谱曲线更加近似于真实地物的波谱曲线
对波谱曲线进行微调
8.多光谱数据参数设置
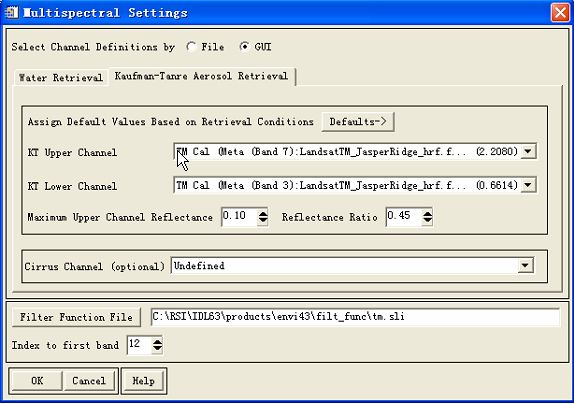
当基本设置里设置了水气反演模型和气溶胶模型时,相应的在改多光谱设置框中设置参数
水气去除模型参数
气溶胶模型参数设置(用气溶胶模型要求数据波段覆盖 660nm和 2100nm波谱.) 设置值见下表所示:
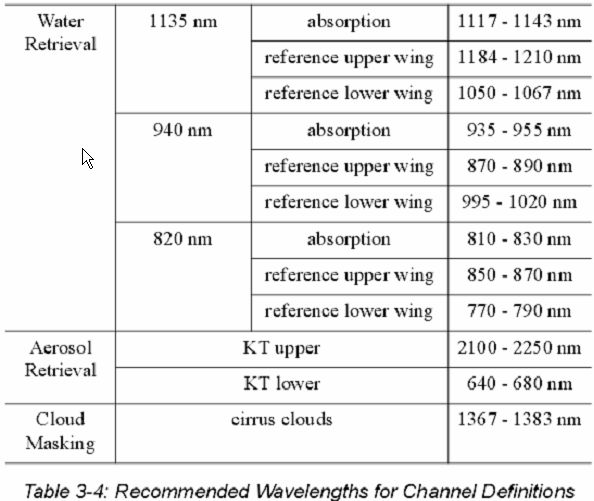
9.高光谱数据参数设置
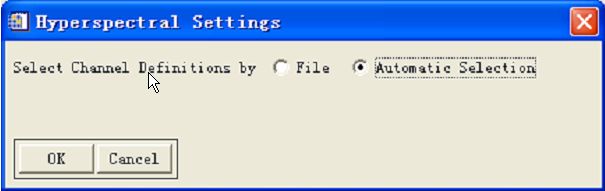
自动选择通道定义(推荐)
设置通道定义
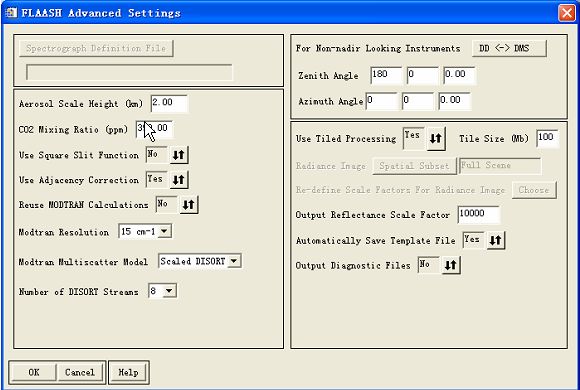
10.高级设置
光谱定义文件:内置 AVIRIS、HYMAP、HYDICE、HYPERION、CASI、AISA
气溶胶高度
CO2 混合比率:390ppm
使用领域纠正
使用以前的 MODTRAN 模型计算结果
设置 MODTRAN 模型的光谱分辨率(推荐值 5 cm-1)
设置 MODTRAN 多散射模型
天顶角"方位角(针对非星下点传感器)