-
参数:

使用方法: fping [选项] [目标...]
-a显示是活着的目标
-A 显示目标地址
-b n 大量 ping 数据要发送,以字节为单位 (默认 56)
-B f 将指数退避算法因子设置为 f
-c n 的计数的 ping 命令发送到每个目标 (默认为 1)
-C n-c,相同报告结果在冗长的格式
-D 打印前每个输出行的时间戳
-e 显示经过的时间上返回数据包
-f 文件读取列表中的目标是从一个文件 (-意味着 stdin) (仅当没有-g 指定)
-g 生成目标列表 (仅当没有-f 指定)
(指定的开始和结束 IP 在目标列表中,或提供一个 IP 子网掩码)
(如: fping-g 192.168.1.0 192.168.1.255 或 fping-g 192.168.1.0/24)
-H n 设置 IP TTL (生存时间跃点)
-i n (在毫秒的时间内) 发送 ping 数据包之间的间隔 (默认为 25)
-我如果将绑定到特定的接口
-l 循环永远发送 ping 信号
-m ping 目标主机上的多个接口
-n 显示目标的名称 (-d 是等效)
-O n 设置的服务 (tos) 标志类型的 ICMP 数据包
-p n 间隔 ping 数据包到一个目标 (在毫秒的时间内)
(在循环和计数模式,默认值 1000年)
-q 安静 (不显示每个目标/每-平结果)
-Q n-q,相同但显示摘要每隔 n 秒钟
-r n 试次数 (默认 3)
-s 打印最终统计
-S 地址设置源地址
-t n 个人目标初始超时 (以毫秒的时间内) (默认 500)
-T n 忽略 (为了兼容 fping 2.4)
-u 显示是遥不可及的目标
-v 显示版本
要检查 (如果没有-f 指定) 的目标的目标列表
-
实例:
1.扫描局域网里面的ip地址:fping -a -g 起始ip 结束ip
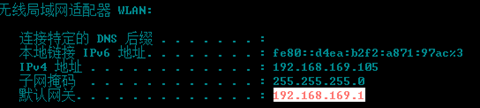
==>扫描这个局域网里面的ip(192.168.169.1~192.168.169.255)
 方式一:
方式一:fping -a -g 192.168.169.1 192.168.169.254
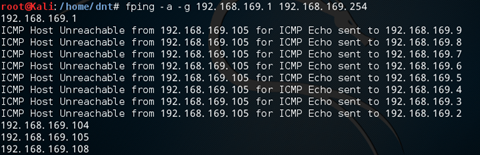
解释:-a 存活地址 -g指定的开始和结束 IP 或 指定 IP 子网掩码(192.168.169.0/24)
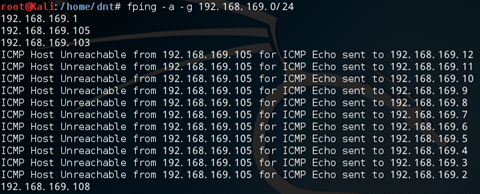
 方式二:
方式二:fping -a -g 192.168.169.0/24
得到ip后你可以先尝试一下:(99%失败,偶尔也会成功哦~后面会深入讲的)
- Windows:telnet ip地址
- Linux系列:ssh root@ip地址
★Kali信息收集~★7.FPing :ip段扫描
2016-05-09
2948
版权
版权声明:
本文内容由阿里云实名注册用户自发贡献,版权归原作者所有,阿里云开发者社区不拥有其著作权,亦不承担相应法律责任。具体规则请查看《
阿里云开发者社区用户服务协议》和
《阿里云开发者社区知识产权保护指引》。如果您发现本社区中有涉嫌抄袭的内容,填写
侵权投诉表单进行举报,一经查实,本社区将立刻删除涉嫌侵权内容。
简介:

目录
相关文章
|
2月前
|
网络协议
开发工具
git
|
2月前
|
Go
|
2月前
|
Ubuntu
网络协议
网络安全
|
2月前
|
域名解析
网络协议
网络安全
|
2月前
|
安全
|
3月前
|
安全
网络协议
网络安全
|
4月前
|
XML
网络协议
安全
|
SQL
安全
网络协议
|
网络安全
Python
|
数据采集
分布式计算
算法
热门文章
最新文章
1
随机生成UserAgent的python库(fake-useragent库)
2
使用zxing识别一幅包含多个二维码的图片
3
阿里云的SLB,植入cookie和重写cookie有什么区别?
4
基于Flink的实时日志分析系统实践
5
如何在服务器上跑python程序
6
电池技术多年没有较大发展,成为移动设备最大制约
7
Spread for WinRT 7新功能使用指南
8
codeforces Soldier and Number Game(dp+素数筛选)
9
九度oj-1001-Java
10
Android:随笔——对页面的View进行截图
1
分解商业周期时间序列:线性滤波器、HP滤波器、Baxter滤波器、Beveridge Nelson分解等去趋势2
9
2
分解商业周期时间序列:线性滤波器、HP滤波器、Baxter滤波器、Beveridge Nelson分解等去趋势法1
9
3
灰色关联分析(Grey Relation Analysis,GRA)中国经济社会发展指标
9
4
极值分析:分块极大值BLOCK-MAXIMA、阈值超额法、广义帕累托分布GPD拟合降雨数据时间序列
9
5
GARCH-DCC模型和DCC(MVT)建模估计
8
6
ARIMA、ARIMAX、 动态回归和OLS 回归预测多元时间序列
10
7
R语言预测期货波动率的实现:ARCH与HAR-RV与GARCH,ARFIMA模型比较
10
8
spss modeler用决策树神经网络预测ST的股票
9
9
K-means和层次聚类分析癌细胞系微阵列数据和树状图可视化比较
8
10
matlab中使用VMD(变分模态分解)对信号去噪
8



