Torontocity
HCI
middlebury
caltech 行人检测数据集
ISPRS航拍数据集
mot challenge跟踪数据集
数据集名称
- KITTI
很知名的数据集 数据集链接 http://www.cvlibs.net/datasets/kitti/ - Oxford RobotCar
对牛津的一部分连续的道路进行了上百次数据采集,收集到了多种天气、行人和交通情况下的数据,也有建筑和道路施工时的数据。1000小时以上。 数据集链接 http://robotcar-dataset.robots.ox.ac.uk/datasets/ - Cityscape
一个面向城市道路街景语义理解的数据集
数据集链接 https://www.cityscapes-dataset.com/ - Comma.ai
geohot创办的comma.ai的数据集,80G左右
数据集链接 https://github.com/commaai/research - Udacity
数据集链接 https://github.com/udacity/self-driving-car/tree/master/datasets
也有模拟器 - BDDV
Berkeley的大规模自动驾驶视频数据集
数据集链接 http://data-bdd.berkeley.edu/#video - GTA
grand theft auto游戏
网站链接 http://www.rockstargames.com/grandtheftauto/ - TORCS
The Open Racing Car Simulator
数据集链接 http://torcs.sourceforge.net/ - CARLA
Intel和丰田共同推出的一个开源的模拟器
数据集链接 http://carla.org/
代码链接 https://github.com/carla-simulator/carla
KITTI
论文链接 http://www.webmail.cvlibs.net/publications/Geiger2012CVPR.pdf
Oxford RobotCar
论文链接 http://robotcar-dataset.robots.ox.ac.uk/images/robotcar_ijrr.pdf
Over the period of May 2014 to December 2015 we traversed a route through central Oxford twice a week on average using the Oxford RobotCar platform, an autonomous Nissan LEAF. This resulted in over 1000km of recorded driving with almost 20 million images collected from 6 cameras mounted to the vehicle, along with LIDAR, GPS and INS ground truth.
数据集采集时走过的路线: 
Data was collected in all weather conditions, including heavy rain, night, direct sunlight and snow. Road and building works over the period of a year significantly changed sections of the route from the beginning to the end of data collection.
By frequently traversing the same route over the period of a year we enable research investigating long-term localisation and mapping for autonomous vehicles in real-world, dynamic urban environments.
在不同天气、光线情况和交通状况下的数据集中的示例图: 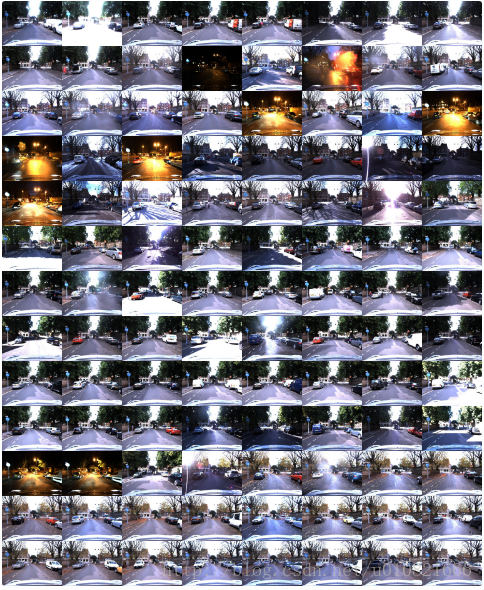
Cityscape
论文链接 https://arxiv.org/pdf/1604.01685.pdf 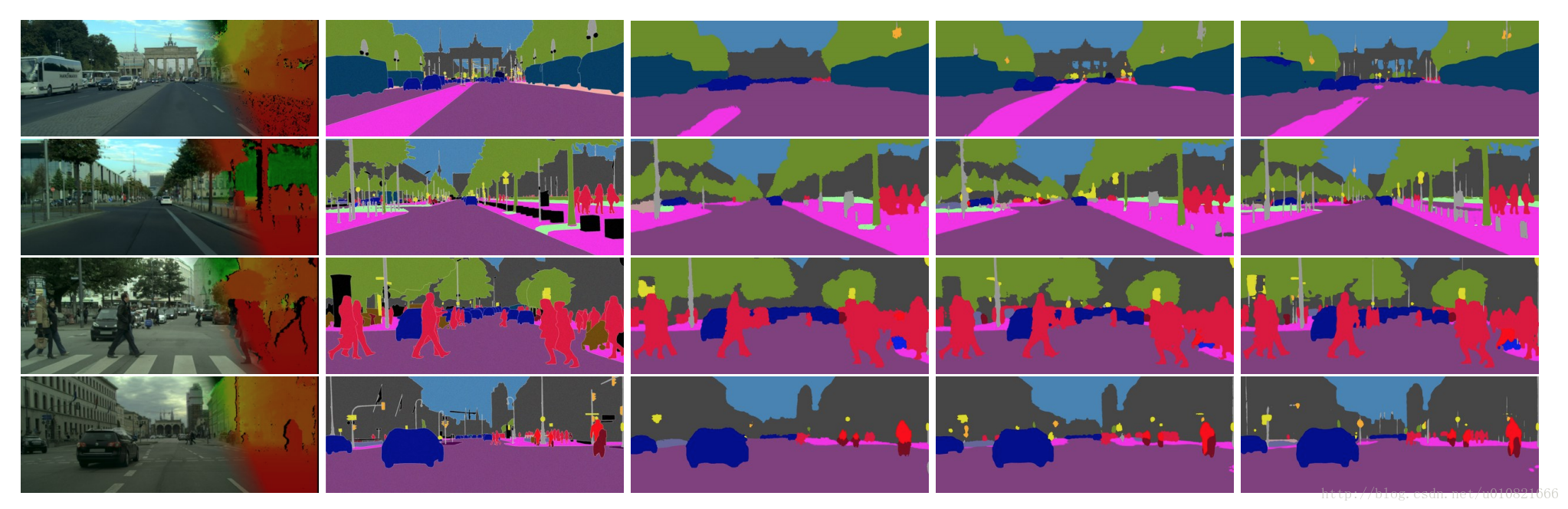
Comma.ai
论文链接 https://arxiv.org/pdf/1608.01230.pdf
论文中对于数据集的描述如下 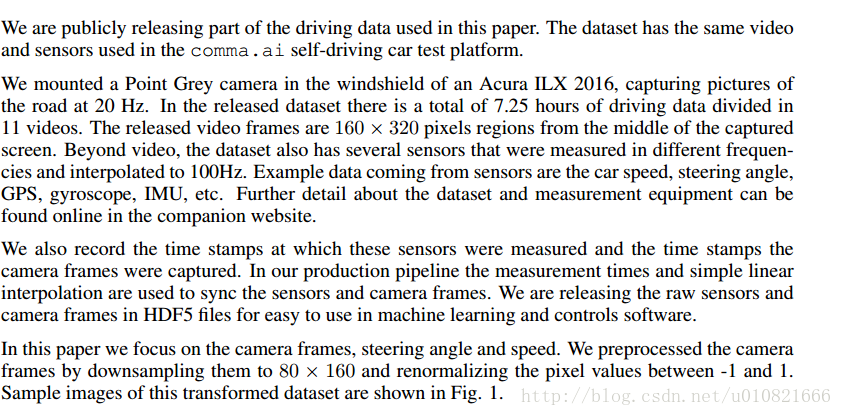
Udacity
Udacity为其自动驾驶算法比赛专门准备的数据集
The dataset includes driving in Mountain View California and neighboring cities during daylight conditions. It contains over 65,000 labels across 9,423 frames collected from a Point Grey research cameras running at full resolution of 1920x1200 at 2hz. The dataset was annotated by CrowdAI using a combination of machine learning and humans.
Labels
Car
Truck
Pedestrian 
This dataset is similar to dataset 1 but contains additional fields for occlusion and an additional label for traffic lights. The dataset was annotated entirely by humans using Autti and is slightly larger with 15,000 frames.
Labels
Car
Truck
Pedestrian
Street Lights 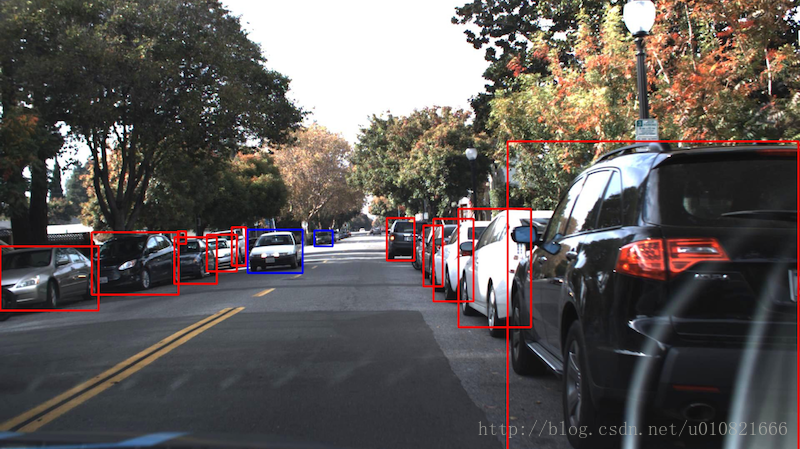
BDDV
Berkeley的deepdrive研究组的用于自动驾驶的大规模数据集。包括视频数据集,图像分割数据集,目标检测和可行驶区域的数据集。
视频数据集:
Explore over 400 hours of HD video sequences across many different times in the day, weather conditions, and driving scenarios. Our video sequences also include GPS locations, IMU data, and timestamps.
分割数据集:
Explore over 5000 diverse images with pixel-level and rich instance-level annotations.
GTA5
中文名侠盗猎车手?一款赛车游戏,现在也被用来训练自动驾驶的模型。
GTA5中几乎涵盖了各种各样的道路状况,包括山区、郊区和城市。还有各种各样的车辆,比如警车、救护车、出租车、货车等车型。
据说Uber的研究人员在训练他们的自动驾驶模型用来玩GTA5这款游戏。
TORCS
This is the official site of TORCS, The Open Racing Car Simulator. TORCS is a highly portable multi platform car racing simulation. It is used as ordinary car racing game, as AI racing game and as research platform. It runs on Linux (all architectures, 32 and 64 bit, little and big endian), FreeBSD, OpenSolaris, MacOSX and Windows (32 and 64 bit). The source code of TORCS is licensed under the GPL (“Open Source”). You find more information about the project in the menu bar on the left. If you need help have a look at the FAQ first, I added a new Researchers section. You can contact us on the torcs-users mailing list (you need to subscribe to use it because of spam).
TORCS features many different cars, tracks, and opponents to race against. You can steer with a joystick or steering wheel, if the device is supported by your platform. It is also possible to drive with the mouse or the keyboard. Graphic features lighting, smoke, skid marks and glowing brake disks. The simulation features a simple damage model, collisions, tire and wheel properties (springs, dampers, stiffness, …), aerodynamics (ground effect, spoilers, …) and much more. The game play allows different types of races from the simple practice session up to the championship. Enjoy racing against your friends in the split screen mode with up to four human players.
TORCS was initially created by Eric Espié and Christophe Guionneau, substantial parts have been added by other contributors (have a look into the “Credits” section for details). The project is currently headed by Bernhard Wymann.The TORCS source code is licensed under the terms of the GNU General Public License (GPL 2), most of the artwork is licensed under the Free Art License, have a look into the packages for details about copyright holders and the licensing.
The next big development goal is an online racing mode. 
CARLA
论文链接 https://arxiv.org/pdf/1711.03938.pdf
英特尔&丰田联合开源城市驾驶模拟器CARLA
CARLA is an open-source simulator for autonomous driving research. CARLA has been developed from the ground up to support development, training, and validation of autonomous urban driving systems. In addition to open-source code and protocols, CARLA provides open digital assets (urban layouts, buildings, vehicles) that were created for this purpose and can be used freely. The simulation platform supports flexible specification of sensor suites and environmental conditions. 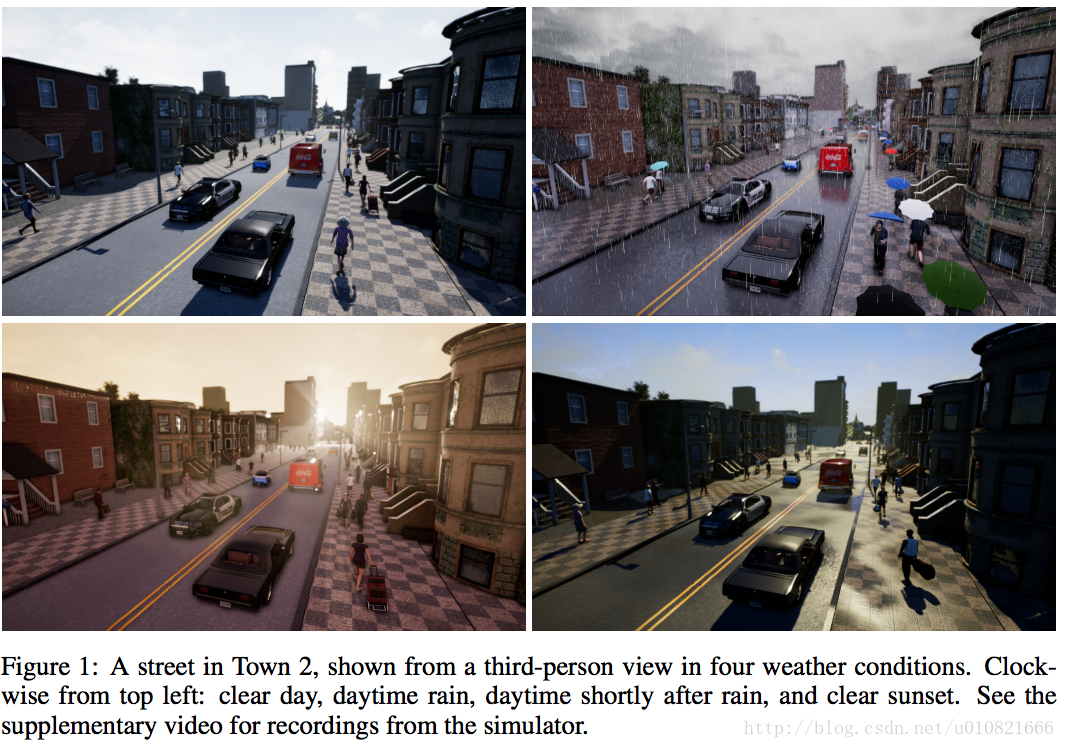
Carcraft
谷歌母公司Alphabet的自动驾驶子公司Waymo开发的一款软件,用来在诸如加州山景城和得克萨斯州奥斯汀等虚拟重建城市中测试无人驾驶汽车软件。该公司每天要开1287万公里的虚拟里程,专注于特别棘手的道路状况。
在虚拟的奥斯汀、山景城、凤凰城,以及那些模拟的测试场景里,有25000辆虚拟的无人车穿梭其中。它们每天总共要行驶800万英里(约1287万公里),去年一整年,Waymo的虚拟无人车行驶了25亿英里,而实体测试车全年累积的里程,只有300万英里。

另外,Waymo还在美国加州中央山谷地区的小城默塞德附近建了一个叫做castle的无人驾驶基地,综合了多种路况,利用多种道具建立了一个小型“城市”。
