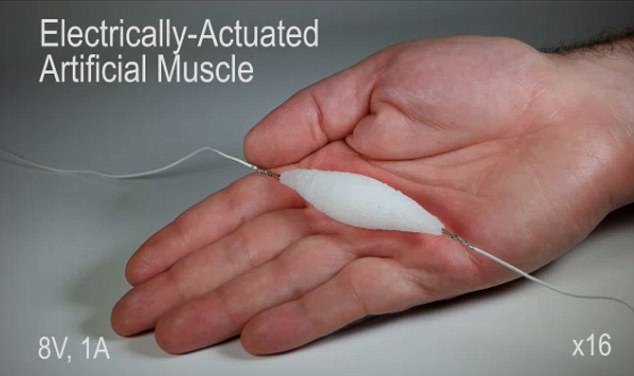
当温度达到80摄氏度时候,该人造肌肉能够膨胀900%。
柔性机器人的发展很大程度上离不开合成肌肉材料的研发,最近美国哥伦比亚大学的工程师就研究出了新的可用于人形机器人的合成肌肉,能够承受比自身重量高1000倍的压力,并且还能模仿出人体肌肉做出推、拉、弯曲等动作。
据了解,为了能够实现高强度的压力承受要求,研究团队使用了微泡中遍布乙醇的硅橡胶材料,将其他一些材料的弹性特性和极端体积变化属性组合在一起,再通过3D打印可以制造出相应的形状。
为了进一步测试这种人造肌肉的一些特性,研究人员用一根细电线和8 伏低压电进行了电刺激,当温度达到80摄氏度时候,该人造肌肉能够膨胀900%,通过计算机操控,这种人造肌肉能够执行所设计的一些动作任务。
团队负责人Hod Lipson教授表示,“虽然,我们在制造机器人的领域获得了巨大的进步,但是机器人的身体仍然非常原始。新的材料能够有一千种塑造和改变的方式。”教授认为我们已经克服了制造人形机器人的最后障碍。
之后,研究人员还准备用传导性材料取代嵌入式的电线,从而达到加快肌肉反应速度和使用寿命的目的。
原文发布时间:
2017-11-01 09:07
本文作者:
巫盼
本文来自云栖社区合作伙伴镁客网,了解相关信息可以关注镁客网。
